
Funding Entity: Ministry of Science, Innovation and Universities.
Reference: Research project PID2022-138206OB-C33
Participating entity: ITAP (Institute of Advanced Production Technologies), University of Valladolid.
Duration: 01-Septembery-2023 - 31-August-2026
Project coordinated with the Robotics Group of the University of Málaga and the Nbio group of “Miguel Hernández University” of Elche.
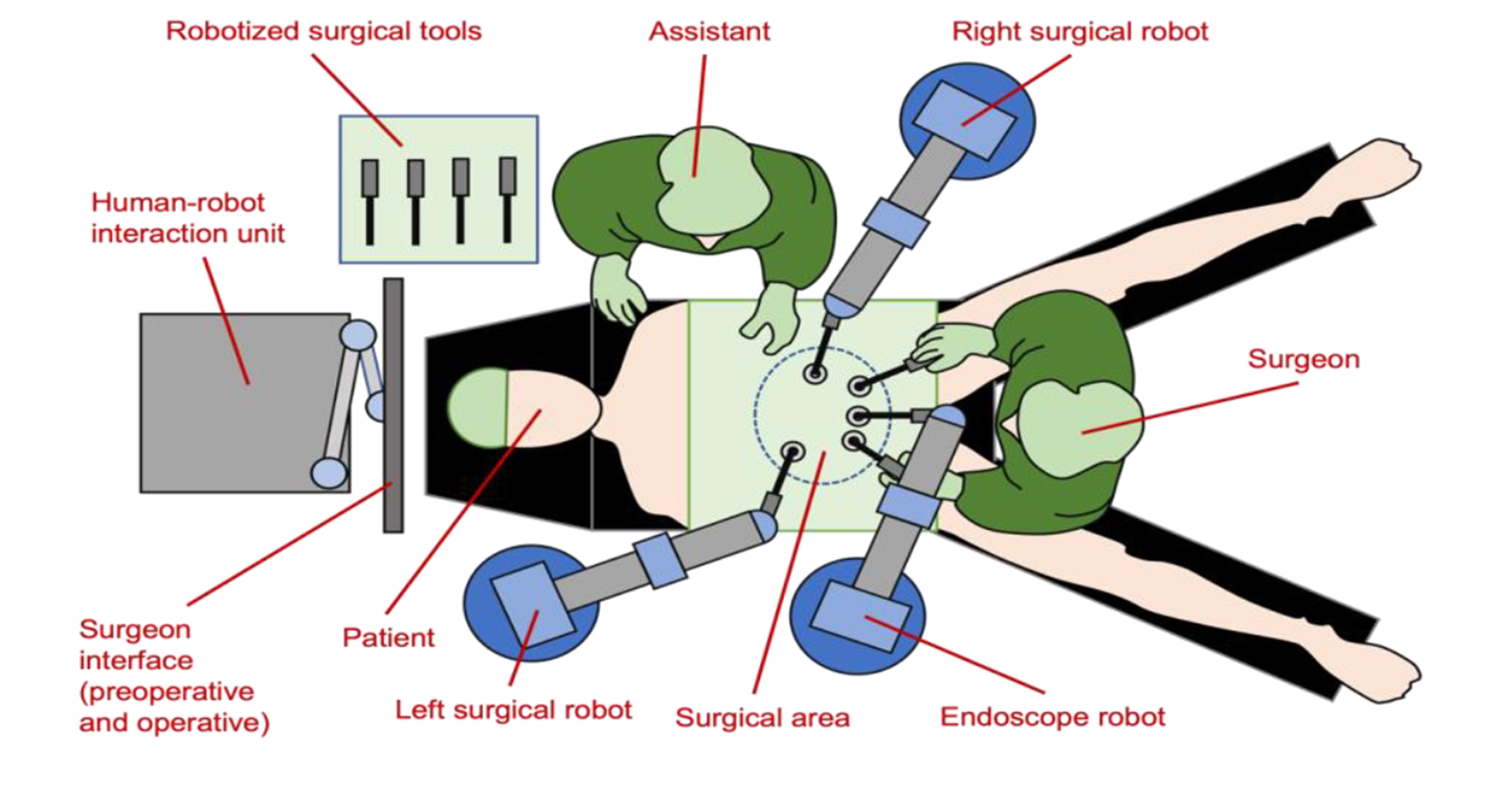
The general objective of this project focuses on the development of technologies for providing a robotic assistant for laparoscopic liver surgery with skills for helping in the resolution of bleeding events that occur during surgery, as well as the management of both an intraoperative ultrasound probe and the endoscope. All these functionalities will be integrated and validated under a cognitive scheme.
The robotic system will work in two different stages; one preoperative and one operative, which will be managed by the human-machine interaction unit. In the first stage, it provides the functionalities for configuring the surgical space and a navigation interface, which allows the surgeon to plan certain manoeuvres and define the interaction with the robotic arms. On the other hand, it includes a learning system that teaches the robots how to carry out both bleeding assistance manoeuvres and intraoperative ultrasound probe movements. In the operative stage, the robotic system can detect bleeding situations in the liver, locate the source and activate the robotic assistance (autonomous actions of the robots and others in collaboration with the assistant or surgeon) that will consider the origin and severity of the bleeding. This robotic assistant carries out the autonomous manoeuvre according to preoperative learning, which is complemented using extended reality to facilitate the surgeon’s actions. Likewise, the human-robot interaction unit supervises the actions of the robots, so that, in case of failure, it can replan the manoeuvre or request for the assistant’s help for moving an arm by directly assisted tele-operation.

