
Funding Entity: Ministry of Economy and Competitiveness - National R & D Plan.
Reference: DPI2016-80391-C3-3-R
Participating entity: ITAP (Institute of Advanced Production Technologies), University of Valladolid Project coordinated with the robotics group of the University of Málaga and the Nbio group of the Miguel Hernández University of Elche.
Duration: 01-January-2017 - 31-December-2019
Endonasal Endonasal Surgery (EUS) offers neurosurgeons a minimally invasive surgical technique for interventions in the cranial base, in which specific surgical instruments and an endoscope are inserted through the patient’s nostrils. This type of approach avoids scarring of the face and reduces the recovery time of the patient with respect to other approaches. However, it requires expertise and precision in the movements of the neurosurgeon since the operative field coexists critical anatomical structures as well as displacements of brain matter due to the change in internal pressure when the hole is made at the base of the skull (brain-shift). Currently, the robots that assist in neurosurgery focus on the location of electrodes in the deep areas of the brain, the shared control for the craniotomy, and few, on the management of the endoscope, guided by the surgeon, for the endonasal approach.
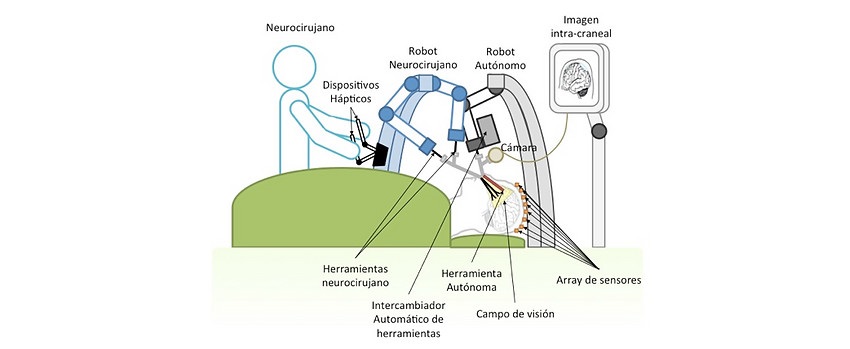
The project that is being developed studies the extension of the concept of robotic system “co-worker”, within a cognitive learning scheme, applied to the endonasal approach. It will provide the neurosurgeon with safety in the intervention through assistance in the form of automatic, collaborative, or shared control movements, as well as with augmented reality. The robotic system will adapt to the ergonomics of the intervention, perform a precise surgical navigation, based on the online information provided to measure the brain-shift effect and take into account the pre-operative planning. Also, it will have an automatic exchanger of surgical tools. In this way, the robotic system will incorporate within a fault tolerant cognitive architecture, a movement control system that avoids damage to the nasal passages, a collaborative movement planner with learning capacity and a mathematical model for the prediction of three-dimensional displacements. of the brain based on intra-operative information.
The robotic system that is developed, fruit of the proposed research, will follow an open and scalable platform concept, so that it will be validated by in-vitro experiments that emulate a neurosurgery intervention by endonasal approach.

